
Aerial Path Planning for Urban Scene Reconstruction:
A Continuous Optimization Method and Benchmark
Neil Smith, Nils Moehrle, Michael Goesele, Wolfgang Heidrich
SIGGRAPH ASIA, 2018
Abstract
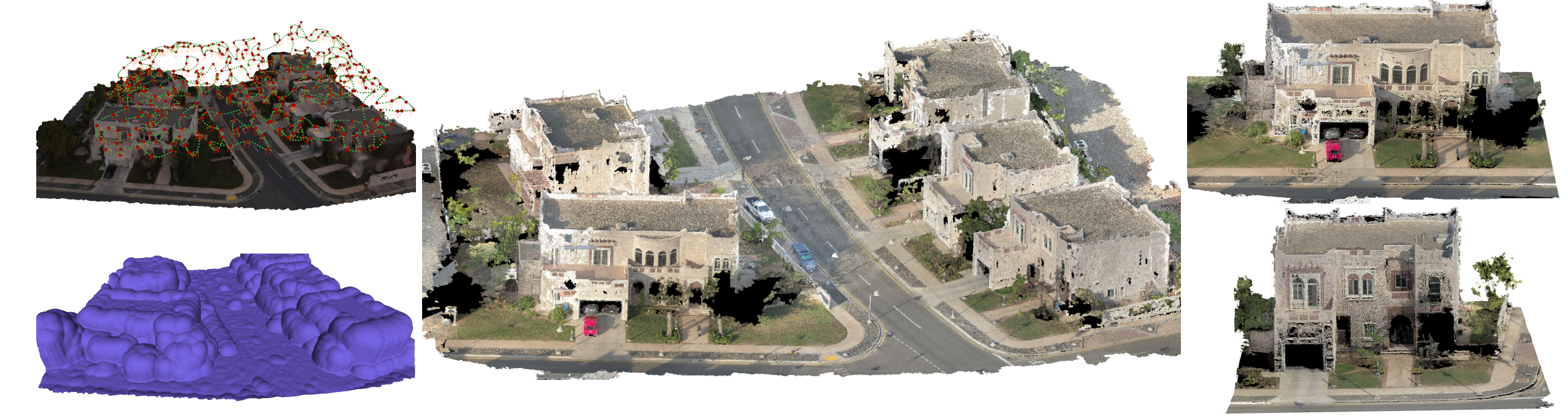
Small unmanned aerial vehicles (UAVs) are ideal capturing devices for high-resolution urban 3D reconstructions using multi-view stereo. Nevertheless, practical considerations such as safety usually mean that access to the scan target is often only available for a short amount of time, especially in urban environments. It therefore becomes crucial to perform both view and path planning to minimize flight time while ensuring complete and accurate reconstructions. In this work, we address the challenge of automatic view and path planning for UAV-based aerial imaging with the goal of urban reconstruction from multi-view stereo. To this end, we develop a novel continuous optimization approach using heuristics for multi-view stereo reconstruction quality and apply it to the problem of path planning. Even for large scan areas, our method generates paths in only a few minutes, and is therefore ideally suited for deployment in the field. To evaluate our method, we introduce and describe a detailed benchmark dataset for UAV path planning in urban environments which can also be used to evaluate future research efforts on this topic. Using this dataset and both synthetic and real data, we demonstrate survey-grade urban reconstructions with ground resolutions of 1 cm or better on large areas (30,000 m^2).Paper and Supplemental Materials
Paper [Full text (~12.84MB)]
Supplementary [supplement file (~16.14MB)]
Benchmark Results [Main Repository]
mvsSim Benchmark Tool [~3.37GB v.1.01 (12/18/2018)]
Path Planning Code[code][instructions][example script]https://drive.google.com/file/d/1KXY_NGSOmjZYFyluUeF7hoVjkJMEYhKG/view?usp=sharing